Publications
- Zou. Z., Zhang R., Shen, S., Pandey G., Chakravarty P., Parchami A., and Liu, H. X. (2022). Real-time Full-stack Traffic Scene Perception for Autonomous Driving with Roadside Cameras. Accepted by the 2022 IEEE International Conference on Robotics and Automation (ICRA), May 23-27, 2022, Philadelphia, USA.
DOI: 10.48550/arXiv.2206.09770 - Zhang R., Zou Z., Shen S., Liu H.X. (2022). Design, Implementation, and Evaluation of a Roadside Cooperative Perception System. Transportation Research Record. June 2022.
DOI: 10.1177/03611981221092402
Presentations
- Meng D., Sayer O., Zhang R., Shen S., Li H., and Liu H. X. (2023). ROCO: A Roundabout Traffic Conflict Dataset, presented at TRB 2023.
Slide Deck - Guo H., Feng Y., Shen S., Zhang R., Liu H.X., Bao S., (2023). An Examination of Driver Behavior at a Roundabout Using Trajectory Data from a Roadside Cooperative Perception System, presented at TRB 2023.
Slide Deck
Project Deliverables
Cooperative Driving Automation
MSight: Infrastructure-based Perception System for Cooperative Driving Automation
- A full-stack cooperative perception system that closes the loop between roadside perception and V2X communication for cooperative driving automation
- The algorithm is deep learning (DL) based and offers state-of-the-art performance with high accuracy and low latency
- Production-ready edge-cloud infrastructure for large-scale deployment
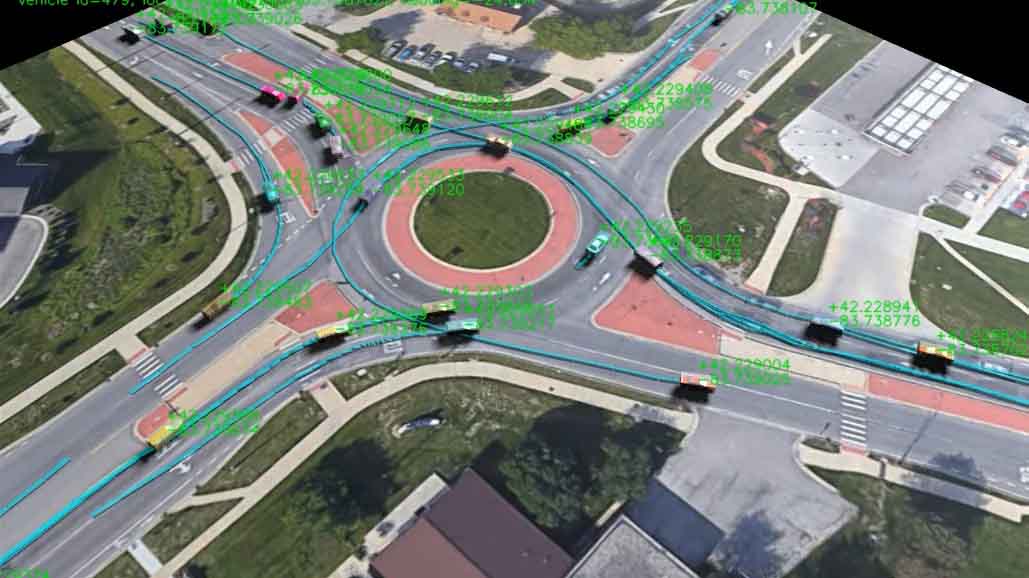
- The roundabout trajectory dataset contains the vehicle trajectory data perceived by the MSight roadside perception system deployed at the two-lane roundabout at the intersection of State St. and W. Ellsworth Rd. in Ann Arbor, Michigan.
MSight: Traffic Conflict & Crash Detection
- A learning-based conflict identification algorithm from video collected at the two-lane roundabout at the intersection of State St. and W. Ellsworth Rd. in Ann Arbor, Michigan.
- Provide guidance to traffic agency for crash-prone location identification and crash prevention
- EEnable naturalistic driving environment building
- The ROudanbout traffic COnflict (ROCO) dataset is a collection of traffic conflict events. Each event captures a 30-second duration of the conflict. The dataset provides the trajectories of the conflicts, along with information about the reason, time, and effect of conflict.